
发布日期:2024-03-29
近日,我院海洋通信与导航技术课题组在水下航行器位姿鲁棒估计方面取得重要进展,相关研究论文“Robust Heading and Attitude Estimation of MEMS IMU in Magnetic Anomaly Field Using a Partially Adaptive Decoupled Extended Kalman Filter and LSTM Algorithm”在国际高水平期刊《IEEE Transactions on Instrumentation and Measurement》发表(中科院二区TOP,IF 5.6)。论文第一作者为2021级海洋技术专业研究生李慧,通讯作者为常帅副教授。
MEMS 惯性测量单元(IMU)是低成本航行器进行导航定位的关键装置,在水下机器人、无人机、无人车等领域均扮演着重要角色。但其一个关键问题是需要借助地磁场的稳定矢量指向性来辅助实现长期稳定的航向估计,当机器人处于明显的磁异常干扰环境时,地磁场指向性变得混乱,导致航向估计精度急剧下降。
针对此问题,研究者从两个角度开展了磁异常干扰环境下的MEMS IMU鲁棒航向姿态解析方法。针对较为稳定且强度适中的磁异常干扰,设计了基于双四元数部分自适应扩展卡尔曼滤波(PADEKF),实现航向与姿态的分步解耦解析;准确跟踪干扰噪声以保证航向解算的精度,同时能够避免对姿态估计的影响。而针对与地磁场强度同量级的强度较大且变化复杂的干扰,提出了长短期记忆神经网络(LSTM)与龙格库塔方法的组合算法来提高航行器航向的长时准确解算能力。 该研究对提升自主航行器在特殊干扰环境下的自主导航能力来说是一种重要的新型方法支撑。
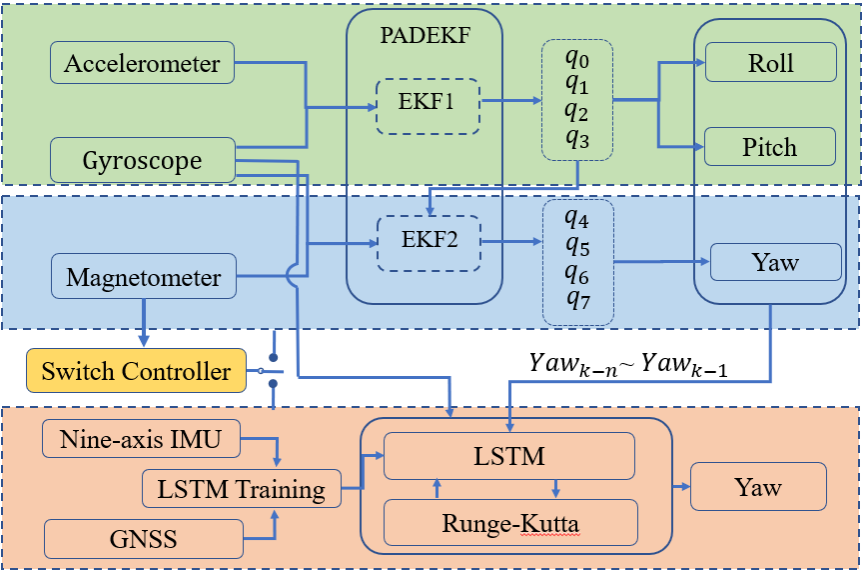
图2 算法总体结构图
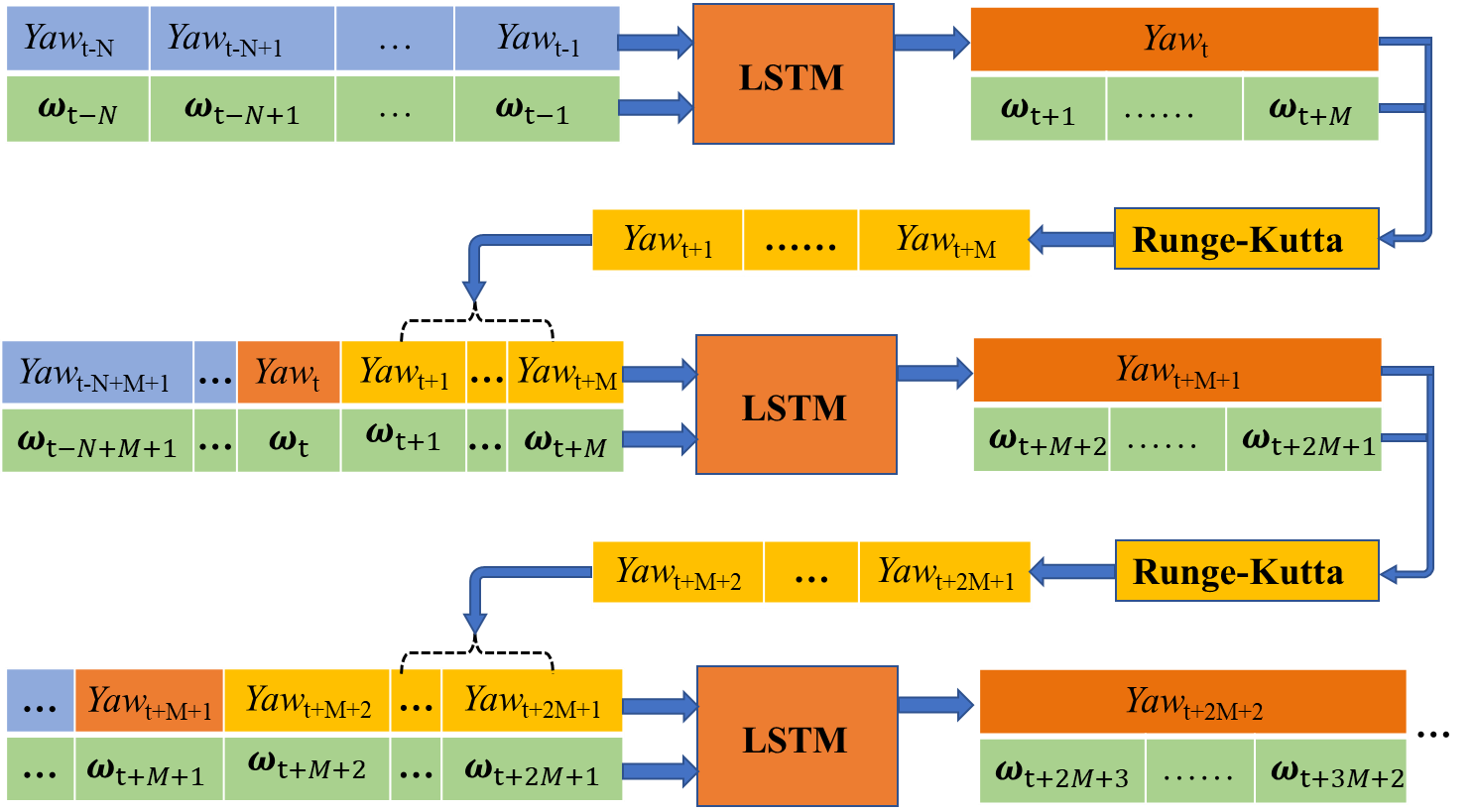
图3 LSTM与Runge-Kutta组合算法
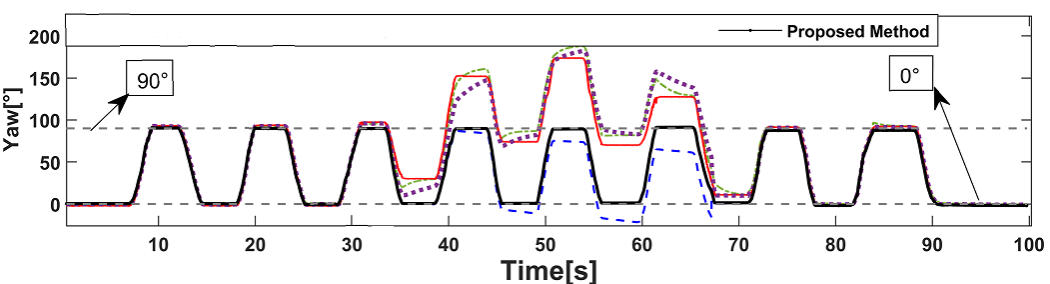
图4 磁干扰情形下的航向角解算结果(部分)

 快捷通道
快捷通道 办公服务
办公服务 招生工作
招生工作 招贤纳士
招贤纳士 奖助评优
奖助评优 院长信箱
院长信箱