
发布日期:2022-10-17
随着人类海洋活动的深入,越来越多的机器人被应用到海洋领域,机器人性能直接决定其可执行任务类型。机器人位姿重复性是评价机器人性能的一个关键指标,研究位姿重复性评价及预测对机器人运动控制、性能提升以及工程应用具有指导意义。近日,天津大学海洋学院研究团队在机器人学顶级期刊《Mechanism and Machine Theory》(SCI 1区Top)上发表一篇题为“Evaluation and prediction method of robot pose repeatability based on statistical distance”的研究论文。本文第一作者为我院2021级硕士研究生张相鹏,通讯作者为海洋学院田文杰副教授。
目前,基于欧氏距离的机器人末端重复度评价方法应用最为广泛,并制定了ISO标准。该类评价方法虽然在一定程度上能够反映机器人末端重复性信息,但也存在如下不足:(1)忽视了重复性的各向异性;(2)忽视了误差分量间的耦合性;(3)忽视了误差量纲的不一致性。而机器人位姿重复性预测方法的现有研究根据不确定误差源的类型主要分为三类:模糊集法、区间分析法以及概率法,模糊集法和区间分析法对运算过程要求极为严格,且不关心位姿重复性的具体分布;概率法虽然考虑了位姿重复性的分布特征,但目前通过测量驱动关节不确定误差预测全域重复性的方法,存在测量手段少、测量效率低的缺点,且该类方法忽略了结构误差参数的不确定性,无法描述闭环运动链内各关节不确定性的耦合作用,因此预测精度难于满足工程需求。
针对现有方法的不足,本文提出了一种基于统计距离的机器人重复度评价和预测方法。该评价方法的基本特征为:(1)模型所描述的机器人重复性信息大幅增加;(2)现有评价方法是本方法的一个特例,可以评价任意方向上的重复性。预测方法的基本特征为:(1)将机器人末端重复性看成由驱动关节等效重复误差导致,并将后者看成是随位形变化的函数;(2)运动学参数取真实系统运动学参数的名义值;(3)基于工作空间若干点的重复测量信息,预测全域的重复性信息。基于该预测模型,文章以Stewart平台为例开展了建模、检测、辨识以及验证实验,验证了所提方法在辨识位形以及其他位形均具有较好的补偿效果。此外,还分析了机器人在全域的重复性分布特征,为提升整体的重复定位精度以及工作空间的选取提供参考。
该研究的理论与工程价值在于:(1)能够精确的评价机器人的在不同方向上的重复定位性能。(2)基于机器人末端若干点的重复测量数据就能预测机器人工作空间全域的重复定位信息。(3)无需建立复杂的机器人系统的几何误差模型,可大幅简化位姿重复性预测流程,且对其他构型的机器人也适用。(4)在工程上,可以利用机器人位姿重复性的全域分布规律,合理规划运动路径和作业空间,以充分发挥其精度能力。
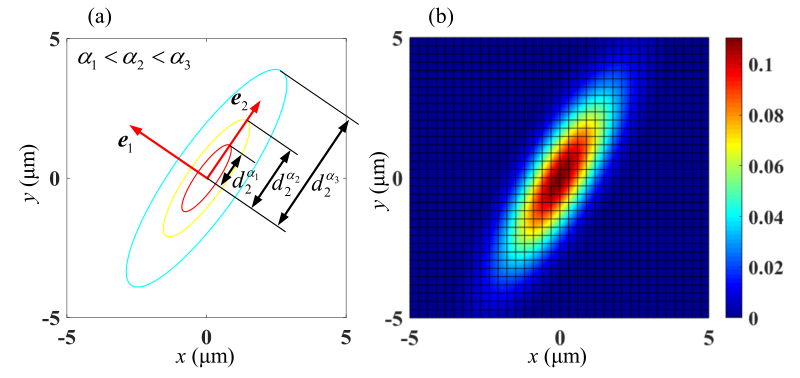
图1重复性椭球及其特征信息. (a)不同置信度下椭球半长轴的长度和方向示意图. (b)数据点落入不同置信度椭球的概率图
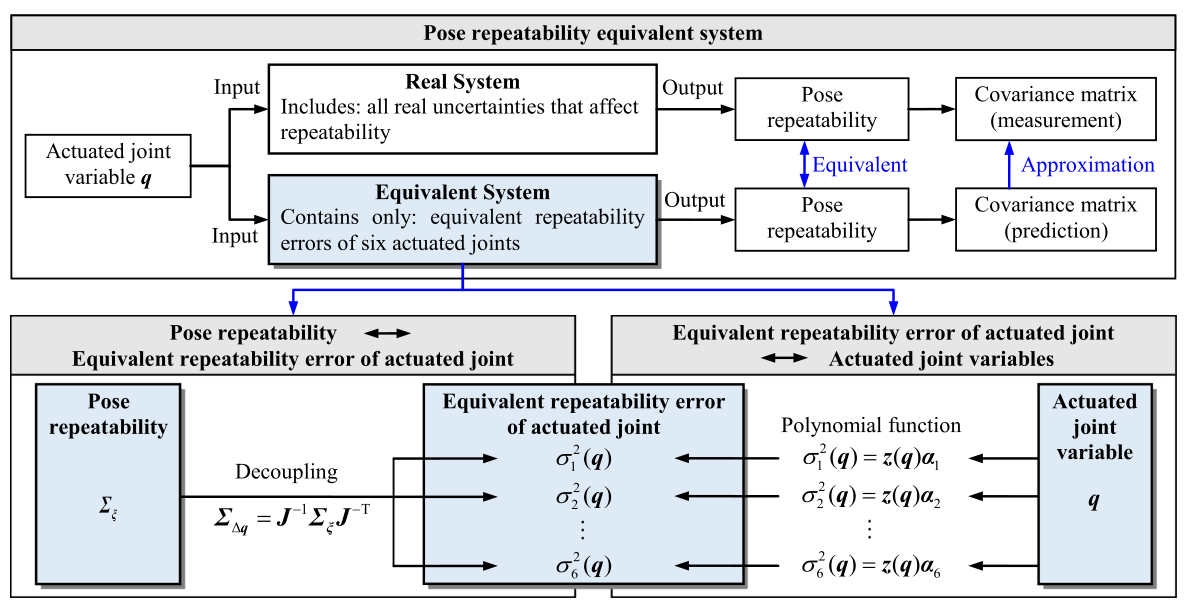
图2全域重复性预测流程图
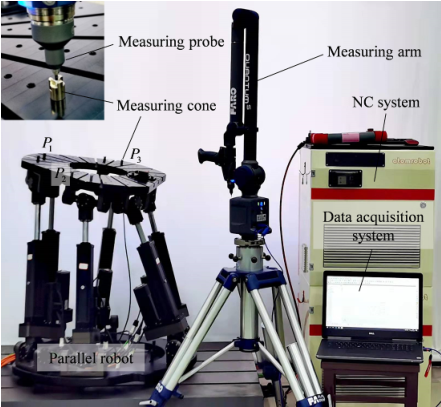
图3实验示意图
近年来,田文杰老师团队致力于海洋探测技术和机器人学相关研究,研究成果在Robotics and Computer-Integrated Manufacturing、Mechanism and Machine Theory、Ocean Engineering、Measurement等国际高水平期刊发表。课题组毕业生5人,在读硕士生5人,学生多次获研究生国家奖学金,“挑战杯”国赛三等奖、天津市特等奖、校级二等奖,中国创新挑战赛优秀奖,天津大学三好学生,天津大学优秀学生干部等荣誉奖项,毕业生前往国防科技创新研究院、中船重工等重点单位工作或继续读博深造。
部分研究成果如下:

图4深远海观测站针对深远海长期观测任务要求,研制了可重复布放回收的智能化、模块化深海观测站,可用于深远海重、磁、深基准点或海洋环境观测站等。

图5风光互补双体无人观测船针对海洋环境长期观测任务需求,研制以风能、太阳能为能源的长航时双体无人观测船。

图6水面水下姿态稳定平台针对海洋观测、作业任务对仪器设备载体姿态稳定性的迫切需求,研制了可实现姿态、位置稳定控制的运动补偿平台(水面水下均可)。

 快捷通道
快捷通道 办公服务
办公服务 招生工作
招生工作 招贤纳士
招贤纳士 奖助评优
奖助评优 院长信箱
院长信箱